弯道|用游戏第一人称视角考验智能驾驶?我们搞了台真车试了试( 三 )
文章图片
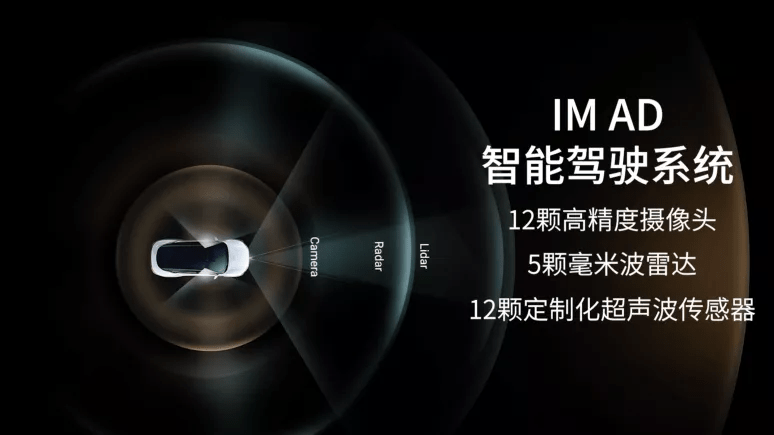
而 IM AD 之所以能像老司机一样完成上述一系列超车变道动作 , 还得益于智己汽车身上那 32 双“ 眼睛 ” 。
12 颗高精度摄像头、5 颗毫米波雷达、12 颗定制化超声波传感器 , 再配上高精地图、高精惯导和 V2X 车端技术 , 赋予了 IM AD 360 度全方位的感知能力 。
文章图片
有车加塞 , 它可以做到 “ 变速不变道 ” , 碰到大曲率弯道 , 也可以丝滑柔顺的通过 。
除了稳重以外 , IM AD 给你带来的乘坐体验也一点不少 , 超车时果断利落 , 避障时也快速准确 。
用游戏里的话来说 , Hi bro....Nice car.
那么智己汽车 IM AD 智能驾驶系统还有哪些 Nice 的地方?
提问解答部分: 鲫鱼拉来了 IM AD 智能驾驶系统的一名工程师 , 好好跟大家盘盘智能驾驶的那些事 。
刚上来的问题就很直接!
Q:智能驾驶最近几年总是出事 , 从专业的角度来看 , 你觉得事故原因有哪些?
A:首先一点是大家对于智能驾驶系统的认知有偏差 , 过度信任智能驾驶系统 , 出现了一些危险驾驶行为 , 导致事故发生 。

文章图片
其次 , 智能驾驶企业或媒体对智能驾驶的过度宣传也是造成消费者认知偏差的一个原因 。
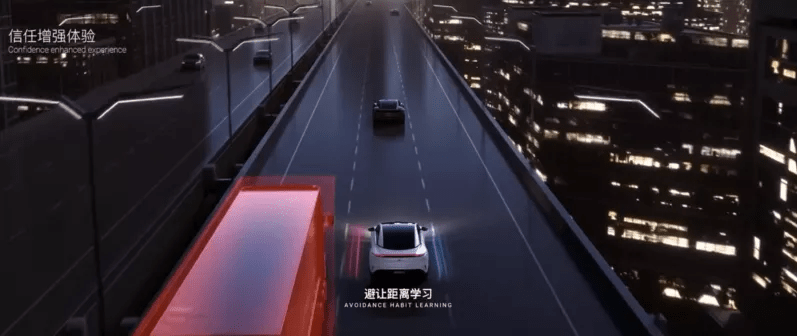
为此 , 我们计划为 IM AD 智能驾驶系统添加一个信任增强模式 。
它会以 WIFI 信号的样式展示当前智能驾驶系统的置信度 , 当信号不是满格的时候 , 证明这个场景下智能驾驶系统不能完全接管 , 就会提醒驾驶者注意随时接管 。

文章图片
驾驶者也可以根据 “ WiFi 的信号强度 ” 自行判断是否接管车辆 。
Q:那是否存在一些专业技术上的原因导致智能驾驶事故频发呢?因为之前大多数事故 , 都是高速上撞了路障车等应急响应车辆 , 这又是为什么?
A:技术本身的原因确实也有 。
对于目前走雷达+视觉路线的智能驾驶系统 , 它们两的决策逻辑一般是视觉站绝对主导权 , 而且目前的雷达识别还存在一些先天性的不足 。
比如对于缓慢行驶物体、静止物体等 , 是毫米波雷达的盲区 , 所以需要视觉快速检测物体 。

文章图片
但因为视觉算法方面考虑的场景不够全面 , 就出现了视觉识别的滞后性 。
比如高速行驶的车辆主体难以识别静止的工程维修车辆或应急车辆 , 等到系统识别到的时候再减速就有点晚了 。
推荐阅读










- TikTok游戏话题浏览时长上涨533%背后,中国厂商的出海新机会
- 王者荣耀:游戏按键皮肤改造,瑶妹遇见神鹿李信一念神魔
- 《2021年全球移动游戏玩家白皮书》,发掘移动游戏领域与TikTok间的新机遇
- 王者荣耀连续推出防沉迷措施,不能因为玩游戏荒废了自己一生
- 王者荣耀钟无艳不能当“大头兵”,出一个复活甲,其作用大于破军
- “你不用做家务,也不用帮我带孩子,因为我不是你的佣人”
- 当独立游戏被陈设在艺术馆中
- 不吃炖粉条了,用它做一道快手家常小炒,筋道爽滑又下饭
- 包菜、鸡蛋、虾仁和芝士,减肥期食用毫无负担
- 王者荣耀:正式服改名卡使用间隔时间由3天调整为15天